Décompositions de vecteurs dans une base
Décompositions de vecteurs dans une base
Décompositions de vecteurs dans une base
Lorsque trois points A,B etC sont non alignés, le triplet (A;→AB;→AC) forme un repère du plan.
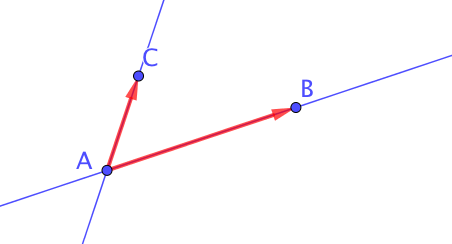
Les vecteurs →AB et →AC forment une base du plan et A est l’origine du repère.
Pour mieux visualiser le repère, on peut tracer les axes qui sont les droites (AB) et (AC).
A partir d’un repère quelconque, il est possible de définir les coordonnées d’un point et ceux d’un vecteur.
Théorème
Soit M un point quelconque du plan,
Alors il existe un unique couple de nombres (x;y) tel que →AM=x→AB+y→AC.
Le couple (x;y) est les coordonnées de M dans le repère (A;→AB;→AC).
Soit →u un vecteur du plan,
Alors il existe un unique couple de nombres (x;y) tel que →u=x→AB+y→AC.
Le couple (xy) est les coordonnées de →u dans le repère (A;→AB;→AC).
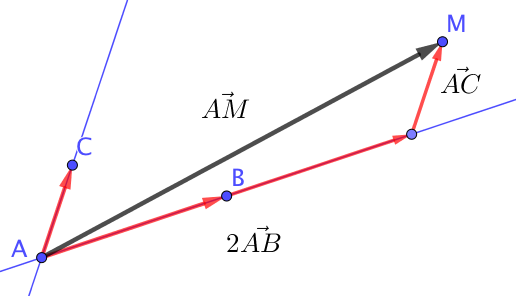
Si l’on doit placer le point M(2;1), il faut revenir à la définition, c’est à dire →AM=2→AB+1→AC.
On commence alors à tracer le vecteur 2→AB puis on lui ajoute 1→AC, par la méthode des parallélogrammes car les deux vecteurs ont la même origine.
Le vecteur →AM est donc la diagonale du parallélogramme ainsi construit et le point M est à l’extrémité de ce vecteur.
Une telle définition permet de se placer désormais dans n’importe quel repère, et donc à partir de n‘importe quelle configuration géométrique, il est possible de définir un repère, permettant de travailler avec les coordonnées.